交叉编译
交叉编译概念
一支编译程序只生成一种机器代码。不同架构使用的编译器不同,并且生成不同的目标代码,例如x86,x64架构上的GCC是不一样的。要在一种CPU架构上生成另一个平台的目标代码,需要使用交叉编译。
- 本地编译(native compile):本机编译出来的程序在本机上运行
- 交叉编译(cross compile):在一个平台上生成另一个平台的可执行代码,即编译环境和运行环境不一样。常用于嵌入式开发
编译用的机器叫宿主机(Host),软件运行的机器叫目标机(Target)。宿主机和目标机通过串口或网络通讯。
为何需要交叉编译?
单片机或嵌入式设备功能较少,硬件资源和性能有限,只能供嵌入式系统运行,难以再提供编译资源。
嵌入式系统一般也比PC系统要轻量,CPU种类更多(如x86、arm、armv7、arm64、mips等),各家的指令集也存在差异,因此嵌入式操作系统一般要针对芯片分别进行编译。应用软件也需要分别编译。
- Android使用Java,运行在虚拟机上,因此不需要分别编译,但是如果使用了so库,则需要分别编译
- iPhone不同版本使用不同CPU架构,编译的时候可以选择目标版本系统和目标架构。
交叉编译工具链
交叉编译工具链(交叉编译器):交叉编译用到的一系列工具、库和头文件等。一般命名为arch-[-vendor][-os][-(gnu)eabi][-tool],如arm-none-linux-gnueabi-gcc、arm-linux-ld等。
常用的交叉编译工具链有两种:GCC/GNU和Clang/LLVM
注:交叉编译工具本身也是应用程序,需要针对主机编译才能运行。因此可能会出现命名如下
x86_64-aarch64-none-linux-gnueabihf:在Linux x86_64主机上运行,目标平台是aarch64架构的Linux系统aarch64-arm-none-linux-gnueabihf:在Linux aarch64主机运行,目标平台是arm架构的Linux系统aarch64-aarch64-none-elf:在Linux aarch64主机运行,目标平台是aarch64架构的裸机系统
- aarch32=arm
- aarch64=arm64
交叉编译示意图如下:
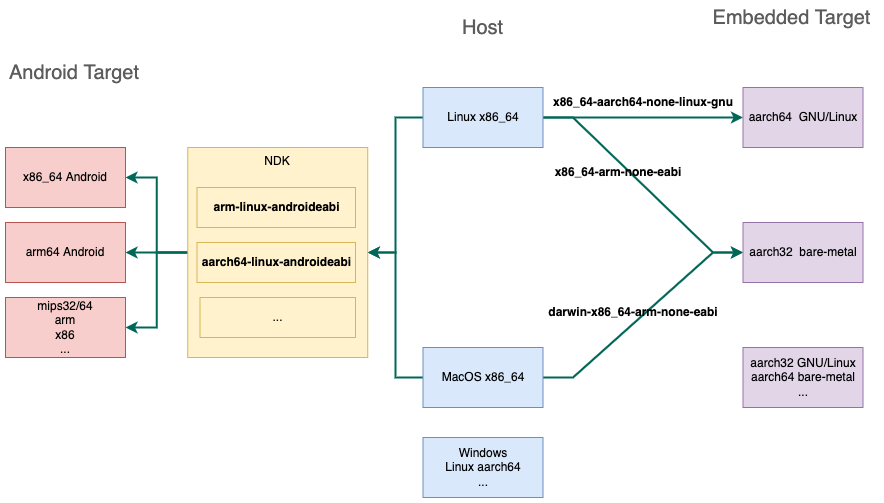
Android和Java代码编译只需要编译成dex或class,不需要编译成目标代码,因此不需要交叉编译。但是Android中的Native开发还是需要使用交叉编译工具链,只不过NDK中做了封装。
ABI(Application Binary Interface)和EABI(Embedded ABI)区别
前者是计算机上的,后者是嵌入式平台上(arm、mips等)
arm-none-eabi和arm-none-linux-eabi区别
前者指目标平台为aarch32架构的裸机系统(ELF bare-metal,没有操作系统),后者指目标平台为aarch32架构的Linux系统(GNU/Linux)
arm-linux-gnueabi和arm-linux-gnueabihf区别
前者适用于armel架构,后者适用于armhf架构。二者的
--mfloat-abi编译选项不同。
gcc编译选项-mfloat-abi有三种值:
- soft:不用fpu进行浮点运算,使用软件模式。
- softfp:armel架构采用的默认值,用fpu计算,传参数用普通寄存器传。
- hard:armhf架构采用的默认值,用fpu计算,传参数也用fpu的浮点寄存器传。
el表示little-endian
hf表示hard float,需要fpu浮点运算单元支持
arm64默认是hf,因此不需要hf后缀
be表示big-endian
交叉编译工具链获取方式:
- 获取源码,自行编译制作:LLVM-Project、Clang构建、Linux ARM交叉编译工具链制作过程
- 使用现成的编译好的工具链:ARM、Linaro、Codesourcery。
- 使用包管理器直接下载,如apt、rpm、yum等
制作LLVM交叉编译工具链
本地编译器构建比较简单(一般可以直接使用包管理器安装),交叉编译器则需要获取LLVM源码自行构建。
Flutter引擎使用Clang/LLVM工具链编译,这里简单介绍下步骤:
1 | 下载源码 |
- -S:源码目录
- -G:使用Ninja构建
- -B:构建目录
- -DCMAKE_INSTALL_PREFIX:LLVM工具和库安装的路径。默认安装在/usr/local,可能会覆盖系统本身的工具
- -DLLVM_ENABLE_PROJECTS:LLVM子项目构建,分号分隔
- -DLLVM_ENABLE_RUNTIMES:运行时库构建,分号分隔
Binutils构建
GNU Binutils:二进制工具集合:
- ld、gold:GNU链接器
- as:GNU汇编器
- addr2line:地址转代码行数
- ar:归档工具
- objdump:输出目标文件信息
- objcopy:拷贝目标文件
- …
1 | 下载源码 |
./configure也是用于生成Makefile文件
libcxx和libcxx构建
1 | cd llvm-project |
[-d path]:判断目录是否存在,存在则条件成立
[-n 变量]:判断变量是否为空,为空则条件成立
踩坑:libcxx和libcxxabi构建报错,网上说是Glibc版本太高,折腾了一下没搞定。
1 | /root/flutter-engine/sdk/toolchain/bin/arm-linux-gnueabihf-ld: /root/flutter-engine/sdk/sysroot/lib/gcc/arm-linux-gnueabihf/9/libstdc++.so: undefined reference to `acos@GLIBC_2.4' |
sysroot
指定编译时的逻辑根目录,只在链接过程中起作用,作为交叉编译工具链搜索目标平台库和头文件的根路径。
编译过程中默认会在
/usr/include、/usr/lib下查找引用的库和头文件,指定sysroot为dir之后会在dir/usr/include、dir/usr/lib下查找。
sysroot本质是目标平台的依赖库,不特指某个库,而是编译时需要的所有的库,不同软件编译依赖不同的库。
软件交叉编译时需要链接对应架构的平台库,在sysroot路径下查找目标平台的库和头文件。
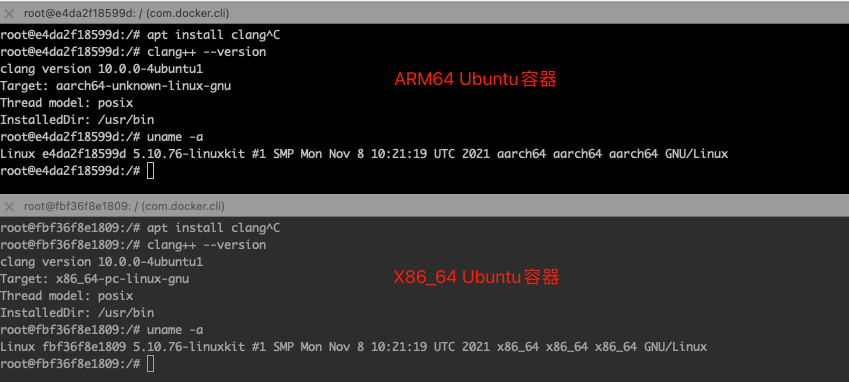
直接在主机用apt安装只会安装当前平台的库,所以需要利用容器环境的包管理工具(apt)下载目标架构的平台库。
例如在arm64容器中和x86_64容器中分别使用apt安装依赖库,二者的目标平台不同(如下图对比)。
制作sysroot
sysroot本质是目标平台的依赖库,只要能下载到编译需要的依赖库即可。
- 网上下载
- 使用Docker+QEMU+包管理器下载已经编好的库
- 使用BuildRoot构建系统,交叉编译依赖库的源码,生成可链接的目标平台库
- 使用Yocto构建系统,交叉编译依赖库的源码,生成可链接的目标平台库
以Docker+QEMU为例,创建flutter_elinux需要的arm64 sysroot
-
在Linux主机上安装Docker
-
安装QEMU,用于运行arm架构容器:
apt install qemu-user-static -
运行Docker官方
arm64v8/ubuntu容器:docker run -it --name ubuntu-arm64 arm64v8/ubuntu:18.04- arm Ubuntu镜像:
docker pull arm32v7/ubuntu - arm64 Ubuntu镜像:
docker pull arm64v8/ubuntu
- arm Ubuntu镜像:
-
在容器中安装依赖库:根据需要安装,这里以Flutter eLinux为例
1
2
3
4apt update
apt install clang cmake build-essential pkg-config libegl1-mesa-dev libxkbcommon-dev libgles2-mesa-dev
apt install libwayland-dev wayland-protocols
apt install libdrm-dev libgbm-dev libinput-dev libudev-dev libsystemd-dev -
将arm64平台的依赖库拷贝到Linux主机:根据需要拷贝sysroot,常用的有
/lib /usr /etc /opt1
docker cp ubuntu-arm64:/ ubuntu-arm64-sysroot
由于公司的远程Linux主机没有权限使用apt,无法安装QEMU,因此在本地Mac主机上运行ARM64容器,下载平台库制作sysroot,再上传到Linux X86_64的容器中进行编译。
pkg-config
通过.pc文件查找软件的头文件和库文件位置,用于C/C++程序链接。
例如/usr/lib/arm-linux-gnueabihf/pkgconfig/x11.pc
1 | cat /usr/lib/arm-linux-gnueabihf/pkgconfig/x11.pc |
- 查看已知的软件包:
pkg-config --list-all - 查看软件头文件路径:
pkg-config --cflags <software> - 查看软件库路径:
pkg-config --libs <software>
输出的格式可以直接用于gcc链接选项,例如
1 | pkg-config --cflags --libs cairo |
CMake配置
CMake编译过程中遇到一些问题,做个记录。
CMakeList.txt中添加打印:message(WARNING ${变量名})
查看CMake变量
cmake --help-variable-listcmake --help-variable CMAKE_SYSROOT_COMPILE
保存临时文件夹
cmake执行时会使用测试项目进行检查。执行完之后会自动删除。
添加--debug-trycompile选项可以保留临时目录。
cmake会调用多个命令,有时候cmake执行失败,我们想调试具体的报错命令,需要用到临时目录。
编译工具链指定
交叉编译时主机可能会包含本地编译工具链,以及多个目标平台的交叉编译工具链,因此需要指定编译工具链。
方式一:执行命令的时候添加参数选项。
例如:-DCMAKE_C_COMPILER=aarch64-linux-gnu-gcc -DCMAKE_CXX_COMPILER=aarch64-linux-gnu-g++
方式二:通过文件配置变量
例如创建gcc_arm_toolchain.cmake文件:
1 | # 指定目标系统 |
执行命令的时候使用-DCMAKE_TOOLCHAIN_FILE=gcc_arm_toolchain.cmake选项指定配置文件,或者在CMakeList.txt中使用include(gcc_arm_toolchain.cmake)引入文件
include_directories
编译过程中如果提示找不到头文件,需要添加头文件查找路径:
- 方式一:编译命令添加
-I dir参数 - 方式二:配置
CMakeList.txt文件,添加命令include_directories([AFTER|BEFORE][SYSTEM] dir1 [dir2...])
BEFORE和AFTER表示将路径添加到列表前面还是后面。SYSTEM表示当成系统搜索目录。
举例:test.h头文件放到sub目录下,main.cpp引用头文件如下:
1 | //main.cpp |
1 | # CMakeList.txt |
执行cmake --build .,生成test程序,执行输出Hello World!
如果直接#include "test.h",构建的时候会提示找不到头文件:fatal error: 'test.h' file not found
此时可以在CMakeList.txt中添加include_directories(sub) ,引入头文件路径,编译成功。
target_include_directories
target_include_directories(target PRIVATE|INTERFACE|PUBLIC dir):指定目标包含的头文件路径。include_directories()会对其子目录起作用,导致整个工程编译时都会增加-I dir
结语
关于GCC链接可以参考构建工具
glibc和glib:
- glib:GTK+库
- glibc:GNU C函数库,glibc介绍和安装
参考资料: